Zusammen mit einem Steering Brick der als Target das Empty beinhaltet, ist dies ein Skript für eine „Mausklickverfolgung“
![]()
Zusätzlich kann man ein Navmesh verwenden. Das kann man durch einen Klick auf den Button in den Einstellungen berechnen lassen.
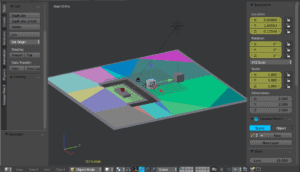
Obstacle Avoidance bedeutet in dem Zusammenhang, das Objekte, als Hindernisse gesehen werden können und dies in der Pfadfindung einberechnet wird. Klappt sehr gut in Blender!
from bge import logic cont=logic.getCurrentController() scene=logic.getCurrentScene() def main(): tracker=scene.objects["Empty"] mouse_over=cont.sensors["Mouse"] mouse_click=cont.sensors["MouseC"] if mouse_over.positive and mouse_click.positive: tracker.worldPosition = mouse_over.hitPosition